
基于嵌入式运动控制器的缠绕机控制系统
引言
玻璃钢管具有耐腐蚀 、 内壁光滑、 流体阻力小、对输送介质无二次污染保温性能好和工程造价低等诸多优点, 使其成为传统钢管的最佳替代品, 在输油输水 、 化工和热电工程 中得到广泛应用。据报导, 2 0 0 1 年西欧玻璃钢管的市场需求量达到 6 . 7万吨, 且年增长率在 1 0 %以上, 世界上各大知名玻璃钢管生产企业纷纷加强研发力量, 极大促进了玻璃钢管工业的发展。目前, 世界各国生产玻璃钢管的主要方法是纤维缠绕成型法。缠绕机是纤维缠绕成型的关键设备, 工作时, 浸渍胶粘剂的纤维纱片通过缠绕机小车上的丝嘴按设计的线型有规律地铺敷在芯模表面上形成缠绕层, 多层缠绕后形成端部带有阴螺纹的缠绕构件 。
本文研制的缠绕机为卧式, 芯模水平放置。缠绕时, 芯模绕其主轴匀速转动, 小车电机拖动小车沿芯模轴向往复运动, 带动绕丝嘴按一定缠绕角度完成纤维在芯模上的缠绕铺放, 达到制品的技术要求。
模块化开放式数控系统已成为当今数控技术的发展方向, 本文的缠绕控制系统采用嵌入式多任务运动控制器实现主轴和小车的同步运动控制和缠绕逻辑控制。讨论了基于 P C机和 T R I O运动控制器的开放式缠绕机数控系统的开发玻璃钢管缠绕机控制系统结构缠绕机由带动玻璃钢管芯模旋转的主轴、 对芯模排布玻璃纤维的小车和树脂以及固化剂供给系统等设备组成。卧式缠绕机缠绕工作时, 芯模绕其主轴匀速转动, 小车电机拖动小车在工作台上沿纵向往复运动, 带动绕丝嘴按一定缠绕角度完成纤维层在芯模上的缠绕铺放工作。小车电机在往复运行时要根据工艺要求不断进行加减速, 而且小车和主轴负载随着缠绕胶量的变化而变化, 易造成导丝头和芯模的相对位置的变化, 从而造成线型异变和纱片搭接不良。缠绕机系统为一个惯量变化很大的非线性时变位置同步随动控制系统, 因此, 采用基于电子齿轮的位置跟踪控制方式以确保纱片搭接良好。电子齿轮模式实际上是一个多轴联动模式 , 其运动效果与两个机械齿轮的啮合运动类似。当前轴工作在电子齿轮模式下时, 需设定电子齿轮传动比, 当前轴将按照这个速度比值, 跟随主动轴运动。主动轴的运动模式可以是任何一种运动模式。当前轴运动位移增量等于与之相联系的主动轴的位移增量乘以电子齿轮传动比。
该缠绕机控制系统结构
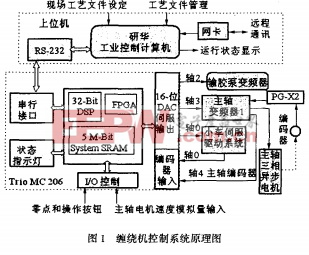
如图 I 所示。上位机采用台湾研华 1 P C 6 1 0 机箱和 P c A一6 1 7 9主板, 它与英国伍o M o t i o n T e c h n o l o g y公司的M C 2 0 6 运动控制器通过 R S一 2 3 2 串口实现通讯, 形成一个功能强大的开放式运动控制系统。工业 P C机负责人机界面管理、 运动状态显示、 远程监控和工艺文件存储等功能, 运动控制器负责实时运动控制和逻辑控制, 该结构支持软件升级和功能扩展, 具有上、 下两级的开放性。
缠绕机主轴电机是 7 . 5 k W 的三相交流异步电动机, 用日本安川 I C I MR―G 7 A 4 7 p 5变频器驱动。对于主轴电机的速度, 本系统采用了抗负载变化能力较大的闭环控制方式。运动控制器轴 3 接口的模拟量输出作为变频器速度控制输入信号, 在运动控制器开环控制状态下设置模拟量电压输出值实现变频器速度控制。安装于变速箱输入轴上的一C WZ 1 X旋转编码器完成主轴转角和速度的检测。变频器采用带 P G矢量控制方式, P G―X 2速度卡把编码器采样的信号一路作为变频器输入实现速度闭环控制, 一路作为速度和位置信号输入到控制器的编码器接口4 , 实现了由一个编码器完成速度闭环控制和主轴转角位置采样的功能。小车采用安川 S G M G H一 4 4 A C A 6 1 伺服电机完成精确定位, 它沿玻璃钢管轴向往复运动, 按照缠绕规律以一定的响应速度和精度跟踪主轴运动。轴 0接口工作于伺服模式, 完成小车伺服电机的闭环控制。主轴编码器反馈接到 MC 2 0 6轴4接口, 作为参考编码器的输入轴, 为小车同步运动提供一个编码器输入。







评论