
TMS320LF2407A实现教育机器人硬件平台
引言
本文引用地址:http://www.amcfsurvey.com/article/150171.htm 智能机器人作为一个高新科技的综合体,直接反应了一个国家信息技术的发展水平,受到了社会各界的高度重视。智能机器人涉及了信息技术的几乎所用内容,可以让学生接触并看到信息技术的全景,并且智能机器人是信息技术的开放平台,学生可以充分发挥想象力去开发各种智能装置,从而培养学生对信息技术的开发能力,在开发过程中,培养各种能力,激发学生的兴趣。
本文设计的以智能小车为载体的基于TMS320LF2407A教育机器人硬件平台,包括电源模块和电机驱动模块电路设计,并集成了红外和光敏传感器和无线数据传输模块,通过软件设计可实现寻迹、避障及寻迹避障相结合的功能,达到了理论课程学习与动手实践相结合的目的,巩固了知识并进一步提高了学习者的兴趣。
1 设计思想与总体方案
1.1 教育机器人的设计思想
本教育机器人以TMS320LF2407A微控制器为核心,由红外传感器和光电传感器等各种传感器采集的外部环境信息作为输入信号,通过DSP进行运算处理,利用PWM技术实时输出调整小车的速度和方向,实现小车寻迹、避障、寻迹加避障等自动控制的功能,另外在小车于寻迹过
程中遇到障碍物,当寻迹加避障算法在寻迹的同时不能完成避障功能时,可由PC机与其相连的无线通信收发模块和DSP相连的另一无线收发模块实现无线短距离通信,控制小车脱离障碍区并进行正常寻迹。
1.2 总体设计方案和框图
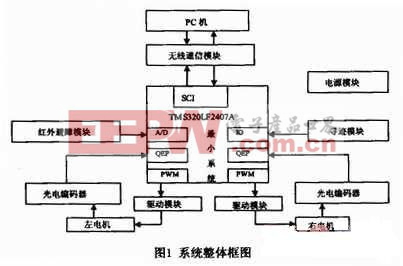
机器人小车系统整体框图如图1所示,主要有TMS320LF2407A最小系统部分、电源模块、电机驱动模块、传感器模块、无线通信模块构成,实现由车载的各种传感器将信息不断地传递给车载微控制器,并将编程设计算法下载至微控制器实现实时调整小车的运动状态,完成一定的功能要求。
2 系统硬件模块设计
2.1 TMS320LF2407A最小系统设计
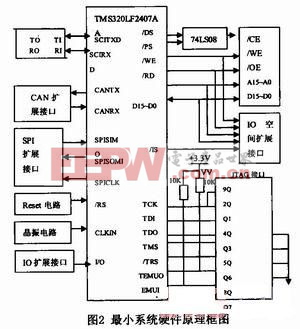
TMS320LF2407A是2000系列中目前应用最为广泛的产品,它在片上不仅具有一个适于进行数字信号处理的高效处理器,而且还集成了存储器和适应控制领域应用的丰富片上外设,从而构成了一个基本的片上计算机系统。除了具有改进的哈佛结构、多总线结构和流水线结构等优点外,它还采用高性能静态 CMOS技术,电压降为3.3V,减少了功耗,指令执行速度提高到40MIPS,几乎所有指令都可以在2 5ns的单周期内完成。TMS320LF2407A的基本结构包括中央处理器单元(CPU)、存储器、片内外设与专用硬件电路三个组成部分。本系统硬件平台充分利用TMS320LF2407A控制器的特点采用模块化设计,分为基本电路和扩展控制电路部分。基本电路包括电源电路、复位电路、时钟电路、A/D 输入通道和JTAG仿真电路等。扩展电路包括存储器及译码电路、串行通信SCI与RS-232接口电路、CAN接口电路、SPI功能模块等。系统硬件原理框图如图2所示。









评论