
科学家挑战技术难题:让机器人获得真实触觉
—— 触觉技术代表了机器人技术中最具挑战性的研究之一
对于所有使用远程操控机器手臂作业的人员来说,他们无法了解接触的物质是什么感觉。这事实上是一种通病,折磨着借助机械设备进行手工作业的每一个人。随着机器人变得越来越普遍,特别是在高风险状况下使用远程操作机器人让人们获益。现在研究人员希望减少那种认知负担,而且通过创造触觉系统使机器人更加有效。它被称作触觉技术,它代表了机器人技术中最具挑战性的研究之一。
本文引用地址:http://www.amcfsurvey.com/article/143459.htm
机器人专家一致在持续追求能反馈触觉而且更容易被人们所操控的机器人设备。
震动是触觉反馈最常见的形式,将这一概念应用于机器人似乎非常简 单。但是外科医生称,由于他们的手已经握紧并且转动控制杆来指挥着病人体内的机器装置,震动可能会带来损伤或者手指麻木的干扰。力反馈并非是一种全面的解 决方案。研究人员必须改变来为这些类型的操作者提供更好的解决方案。
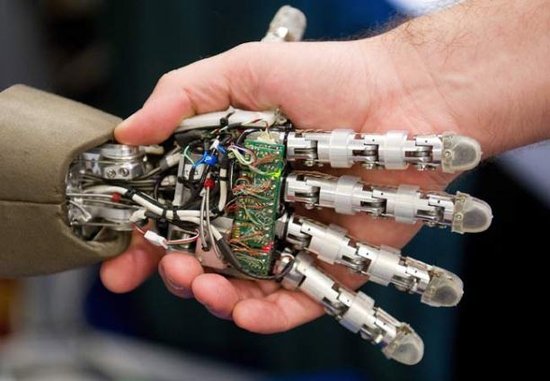
许多公司并非困扰于如何以非干扰的方式传递触觉,它们正致力于改善机器 本身。如果一个机器人知道它正在碰触什么,为什么不能设定程序做出相应的反应?洛杉矶SynTouch公司的传感器被设计成能模拟人类指尖,可以探测力、 震动和温度。配置这种传感器的机器人将这些信息组合就可以从金属中识别出玻璃。这种反馈的方式被“阴影之手”的制作者所接受,它成为世界上最灵巧的机械手 之一。
蒙特利尔的Kinova系统公司目前正在研发一种可以进行触觉升级的机械手臂。这种手臂连接到轮椅上,能够使上半身残疾的人进行抓取 或者控制,并且给予使用者一种微妙的“触觉”。但是第一步将是机械手感觉并且分辨它接触的物体,并且据此进行调整。比如说一杯水,需要平端并且使用足够的 力来握紧而不会打碎玻璃。在追求制造传递触觉以及更加易于操控的机器过程中,机器人专家已经制造出了能更好的自我控制的机器。











评论