
基于双排传感器的循迹策略研究
文摘:智能车的稳定和快速行驶取决于两个重要方面。首先是传感器对道路信息的有效识别,其次是高效处理所得到的所有信息。本文以循迹策略为主要研究对象,以采用双排传感器的智能车为例,做出了优化的直线、大弯、S弯等不同道路情况的循迹策略。经实验证明,此策略紧密结合双排红外的特点,发挥出了双排的优势,使智能车实现了以稳定为先,并追求极限速度的要求,适应能力强,能在各种赛道上均有出色发挥。
本文引用地址:http://www.amcfsurvey.com/article/133353.htm引言
第二届freescale智能车比赛中,各参赛队伍的水平都有了明显的提高。这不仅得益于技术的发展,也是由于参赛选手对比赛的深入理解,对赛车在赛道上的各种情况的了如指掌、处理得当。比赛的车模可选用摄像头或传感器的方式进行道路信息检测。我们的车模采用的是双排红外的循迹方式。
本文分三部分内容阐述双排传感器的控制策略,分为直道策略,大弯策略和S弯策略。每项策略中均以识别方式为前提,辅以控制策略,最后加入保证策略,使智能车行驶顺畅。
双排传感器的优势
目前,大多数智能车采用单排传感器的道路检测方式,这种方式获得的道路信息少,对智能车的状态和道路的状况都不能很好的区别,造成控制上的麻烦。为了弥补不足,形成了大前瞻的单排传感器的道路检测方式,这种方式检测的距离更远,能够更早的判断出道路的走向,在一定程度上弥补了检测精度低的缺点,但也无法有效的区分智能车状态与道路状况。
我们采用大前瞻双排传感器可以得到更多的赛道信息,更早地采取策略处理,形成更好的行车轨迹。是采用复杂的摄像头方案的一种替代方式。
可以在直道中实现稳定控制,加速顺畅的能力;在S弯中以小曲线的方式前进,减少行进路线和舵机调整次数。在大弯中实现提前转弯,切内弯的效果。尤其是在转弯方面,通过前后排共同对弯道的预测,达到延伸物理识别距离的能力,从而做出提前的动作,减少由于检测距离近而带来的负面影响,达到上述效果。
传感器阵列布局
图中仅以接受管示意传感器位置
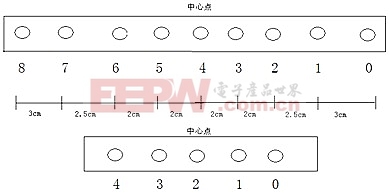
布局方式说明:
- 前排传感器伸出距离较远,小车中心偏离黑线后,会在前排传感器上产生较大偏移量。
- 后排传感器伸出距离较近,小车中心偏离黑线后,会在后排传感器上产生较小偏移量。
- 利用前后排传感器对小车偏移时不同的敏感度对小车进行控制。
- 为了使前后排体现出更明确的分工和采集到更远处的信息,我们把前排传感器倾斜约45°角,使前排的前瞻距离更大,更能体现出前排的优势和特点。
直道识别方式、控制策略
直道识别方式:
1) 采用此种方式布局双排红外,对于直道的判别方法可有以下5种物理方式,每种方式应用的时机列在表后。
第一种直道情况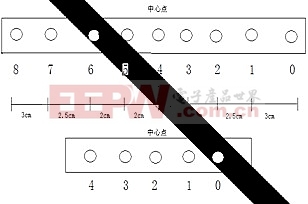
- 如图所示,在左转大弯后,出弯时最可能出现的前后排传感器检测到黑线时的组合情况。
- 适用于左转 90°弯、180°弯。
- 提前得到出弯信息,舵机向左转动较小角度,并在此时采取加速动作,起到弥补前瞻不足的作用。
- 此情况在赛道的s弯出现时,不满足直道的第二种识别方式,故不会加速。












评论