
基于AVR单片机的无刷直流电机控制系统设计
严格地讲,永磁无刷直流电机是一个多变量、非线性系统,线性是在一定的范围内和一定程度上对永磁无刷直流电机系统的近似描述。而在对永磁无刷直流电机控制系统的精度和性能要求较低的应用场合,可以忽略系统的非线性,或者局部线性化后,在一定范围内可以满足对控制的要求。
本文引用地址:http://www.amcfsurvey.com/article/126489.htm控制系统硬件总体构架
系统硬件主要由控制电路、驱动电路、显示电路、RS-232接口电路组成,如图1控制系统硬件框图所示。
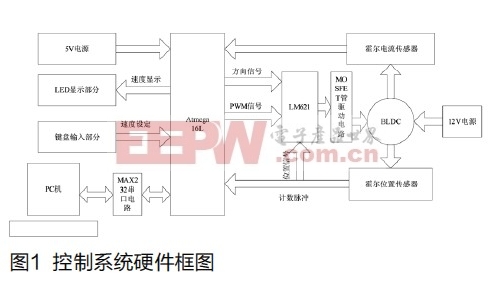
由永磁无刷直流电机运行原理可以知道,永磁无刷直流电机的平均工作电流与转速成反比例函数关系,也即转矩随转速成线性关系,因此控制无刷直流电机转速就可以控制其电磁转矩,而且永磁无刷直流电机通过改变电源电压实现平滑调速。从图1可以看出,本系统是速度闭环和电流闭环双闭环控制系统。霍尔位置传感器的位置信号经信号处理后送专用驱动芯片后产生一个速度脉冲信号经单片机处理转换成转速,再运用增量式PID算法,得到PWM控制信号经过光耦隔离电路驱动专用集成驱动芯片闭环控制转速,并且霍尔电流传感器检测的电流信号进入Atmega 16L单片的A/D转换器[3-4],将电流模拟量转换成数字量后进行电流闭环控制。同时,单片机还监控控制系统的运行状态,当系统出现短路、过流、过压等故障时,单片机将封锁PWM输出信号,使电机停机,并通过LED电路显示故障。
PWM信号产生及处理电路
Atmega 16L产生的PWM信号通过光电藕合器产生同周期的PWM信号,经分压滤波之后输出一个O-5V的用于驱动电路的调速电压。为了起到隔离效果,在光电耦合器输入端采用与Atmega 16L相同的5V电压,在输出端采用给电机供电的12V电压。采用稳压二极管使光电耦合器稳到9V,它的PWM信号经两级RC滤波之后变得平滑,并且光电耦合器的两端分别接地,所以光电耦合器起到了主控电路与驱动电路电气隔离作用。


霍尔传感器相关文章:霍尔传感器工作原理
pid控制器相关文章:pid控制器原理
霍尔传感器相关文章:霍尔传感器原理











评论