
使用CompactRIO系统和LabVIEW软件控制辗环机
"我们之所以选择使用NI公司的产品,是由于该公司产品具有通信速度快、可靠性高,可定制的高速线性化处理逻辑单元,实时性操作系统等优点,以及NI工程师完善的技术支持。"
本文引用地址:http://www.amcfsurvey.com/article/121897.htm– 성 낙문, 칼텍(주)
The Challenge:
创建一个使用高速率控制的系统来精确地定位辗环机的气压缸。
The Solution:
在NI 公司CompactRIO硬件平台上,通过使用现场可编程门阵列(FPGA)与传感器的通信,以提高精确度,控制速度和降低成本。
Author(s):
성 낙문 - 칼텍(주)
Nak Moon SUNG - Caltec Inc.
对于我们以前的轧制控制系统,我们无法通过可编程逻辑控制器(PLC)来控制气压缸的通信和反应速度,而必须使用一种昂贵的PLC传感器通信模式与位置控制传感器进行通信。因此,我们希望找到一种低成本的通信方式。
系统组成
计算机和CompactRIO 辗环机的基本通信架构如图1所示。
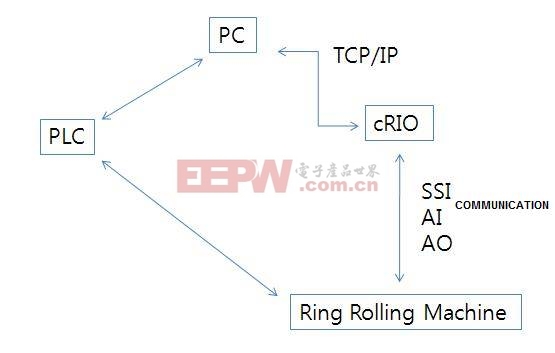
图1.系统模块架构
硬件组成
硬件系统基于CompactRIO硬件平台,该系统由以下部件组成:
用于TCP/IP通信协议和比例微积分(PID)控制的NI cRIO-9074实时控制器
用于位置传感和简单传感接口通信的NI 9411 和 NI 9401 C系列数字输入模块
用于压力传感测量的NI 9219 C系列模拟输入模块
用于比例阈控制的NI 9263 C系列模拟输出模块

图2.CompactRIO系统
用户界面
主机计算机有一个常见的、易于使用的操作系统,我们采用NI LabVIEW图形开发平台进行更快速的用户界面开发。我们使用TCP/IP通信协议来完成CompactRIO 硬件系统和可编程逻辑控制器间的大量数据的采集和发送,帮助我们迅速确认辗环机的状态和控制信息。
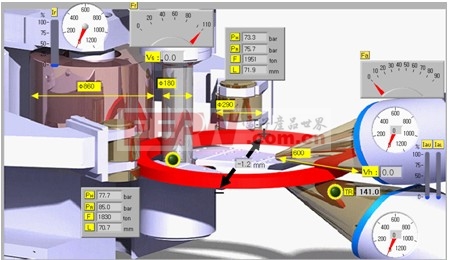
图3.用户界面
FPGA (SSI 通信)程序
为了控制辗环机的气压缸,我们使用NI 9401和NI 9411模块进行简单传感器接口通信,NI 9219模块用于模拟输入传感器负荷,NI 9263模块用于模拟输出,并执行相应的PID控制。
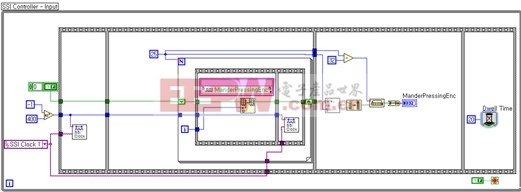
图4.FPGA SSI 程序












评论