
基于MC9S08DZ60的CAN总线振动传感器设计
1 引言
本文引用地址:http://www.amcfsurvey.com/article/103935.htm随着人们安全意识的不断提高设备的安全监测显得越发重要。各种在线监测设备层出不穷,但大多都受到传统总线速率较低,传输精度不高的限制。CAN总线以其在汽车行业内实时、可靠、灵活的应用而备受瞩目,进而不断有其他领域的CAN总线应用产品出现,基于CAN 总线的振动传感器正是其中一种,组网后的传感器能够很好地实现大型装置的在线监测,为企业的安全生产奠定了基础。
2 器件简介
2.1 MC9S08DZ60单片机
飞思卡尔公司的MC9S08DZ系列单机片内嵌 CAN的微控制器,并将内嵌的CAN、EPROM和片上仿真/调试模块组合在一起,集成了所有的功能,设计人员可以便捷地转向其设计流程。 MC9S08DZ60型单机片可提供60 KB的片上flash、4 KB的片上RAM、2 KB的E2PROM。它具有串行通信接口(SCI)、串行外设接口(SPI)、看门狗定时器(COP Watch-dog)、多达24通道的12 bit的A/D转换模块,另外还有I2C总线模块和多个定时器、计数器等。其独特的片上仿真/调试模块(BDG)更是大大简化设计,从而确保了 MC9S08DZ60在汽车和工控的应用地位。
2.2 AD536A有效值转换器
AD536A是一款有效值转换器。它可以连续、实时地计算输入信号的平方、平均值。且得到的直流电压值正比于输入信号的有效值RMS。AD536A具有相当大的响应带宽,在输入有效值大于100 mV时.带宽为450 kHz,而输入大于1 V时,带宽增大到2 MHz。1.2 mA的静态工作电流和宽泛的工作温度使其应用广泛。
AD536A计算RMS时,首先求得绝对值(整流电路);然后进行平方计算:最后是平均计算,即除以反馈的输出电压;再经滤波得出结果。这里要求平均的时间常数要远大于待测信号的周期,这样才能保证测试精度。
2.3 TJA1040 CAN收发器
TJA1040是一款高速CAN收发器,与PCA82C250/251引脚相兼容,TJA1040还提供不上电环境下理想的无源特性。TJA1040和 PCA82C250/251相比较,具有以下几点优势:(1)如果不上电,总线上完全无源;如果VCC关闭,总线上看不到。(2)在待机模式时电流消耗极低,最大电流仅为15μA。(3)改良的电磁辐射EME性能。(4)改良的电磁抗干扰EMI性能。(5)SPLIT引脚代替Vref。引脚对总线的DC稳压很有效。
TJA1040向下兼容PCA82C250/251,并且可在已有PCA82C250/251的应用中使用,而硬件和软件无需任何修改。
3 系统硬件结构
整个传感器包括采集、滤波放大、A/D转换、数据处理上传等模块,如图1所示。采集模块使用环形剪切的传感器,将装置的振动量转变为响应的微小电压后送人滤波放大电路。信号经放大滤波电路分成:高频加速度、低频加速度、速度、位移4个测量参数再传输到有效值转换。这些信号经有效值转换和单片机A/D转换模块后存入单片机,再经由CAN总线网络上传至主控机备份。

3.1 滤波放大模块
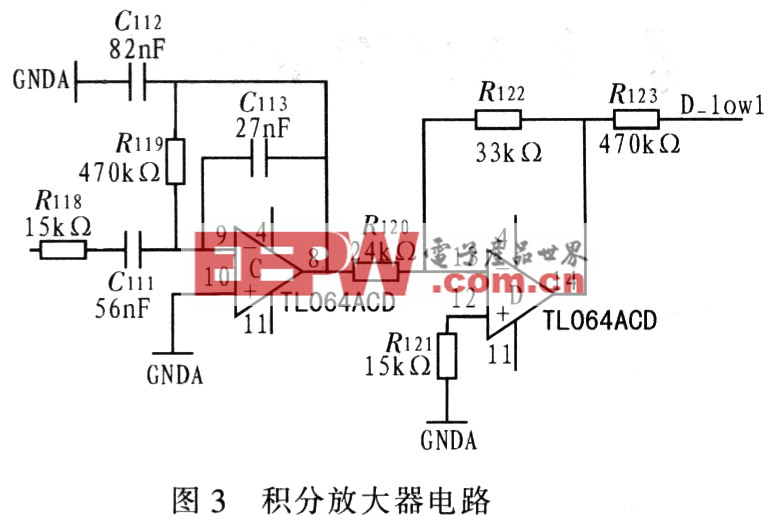
图2为滤波放大模块组成框图,南于压电陶瓷转变后的电信号含有噪声,前端的电压跟随主要是去噪放大。系统将对1O Hz~1 kHz内的信号进行分析,其中包括10 Hz两级高通加速度、10 Hz~1 kHz低频加速度,10 Hz~1 kHz低频速度、10 Hz~1 kHz低频位移。它们经单片机控制的多路开关传输至有效值转换器。这里积分器并没有采用典型积分方式,而是采用一种近似的方法,如图3所示。这种方式能够有效减少噪声,保证纯净信号。

4 系统软件设计
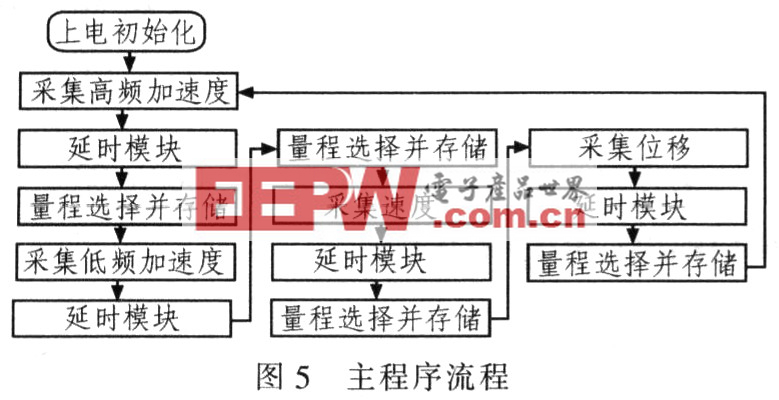
系统软件设计主要包括数据采集存储和CAN通信两大模块。上电初始化后,单片机开始采集A/D转换信号,按照高频加速度、低频加速度、速度、位移的次序采集信号,并存储到片上存储单元。而与主机的CAN通信将以中断形式完成。图5为系统整体流程。
4.1 采集存储程序设计
由有效值转换器输出的数据将接人片上A/D转换模块,MC9S08DZ60单片机提供 24路12 bit的A/D转换模块。上电后对该模块初始化操作,典型的初始化方式:(1)更新配置寄存器ADDCFG用以选择A/D转换器的时钟源和设定内部时钟频率ADCK。该寄存器还可设置采样时间等参数。(2)更新状态控制寄存器ADCSC2,该寄存器可设定转换的触发方式,如果作为比较器使用时还可设定比较方式。(3)更新状态控制寄存器ADCSC1,该寄存器可用来设定转换方式,即持续转换和单次转换。该寄存器还可设定转换通道以及转换完成后是否触发中断。转换后的数据存入结果寄存器ADCRL和ADCRH供系统调用。
系统上电初始化后,系统主程序按照高频加速度、低频加速度、速度、位移的顺序依次设定模拟开关,为防止因刚刚选定通道后信号不稳定而造成测量失真,因此需加入一段延时程序。延时过后,片上A/D转换器模块采集原始和10倍信号,与门限对比后,存入存储单元。为保证数据的有效性,采用采集多组数据后平均方式。在存储之前,处理后的数据会与单片机内部警告门限(可设定)相比对,如果超出预警门限,则再次测量此信号,若连续3次超出门限,将触发预警中断,向上位机发出预警。
4.2 CAN通信模块
4.2.1 CAN模块简介
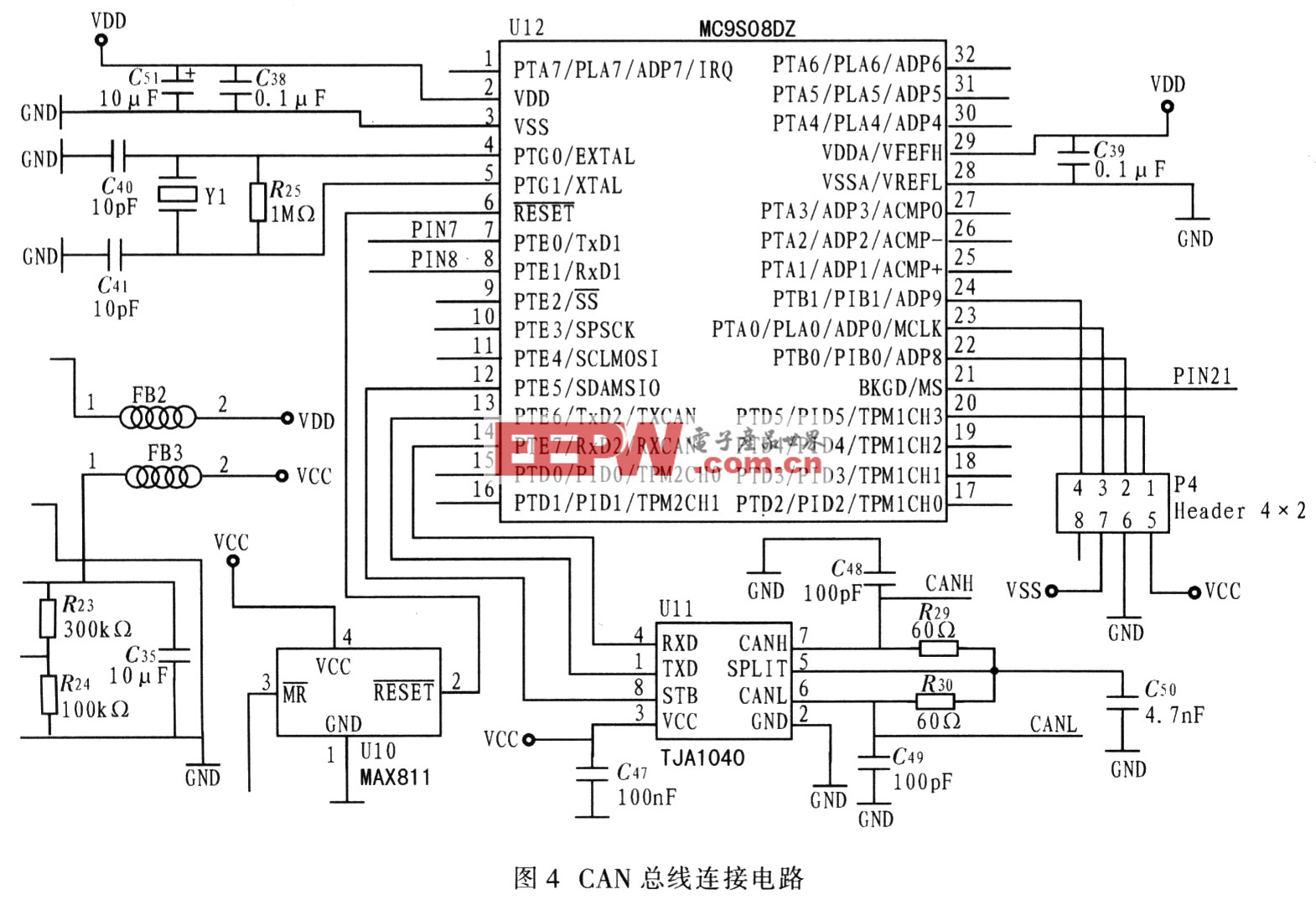
MC9S08DZ60内部集成了应用CAN 2.0A/B协议的CAN控制器,包含5个先进先出的接收寄存器,3个使用本地优先级的发送寄存器。在ID识别方面提供了64 bit的掩码寄存器,可分用为2个32 bit的满值寄存器,或4个16 bit、8个8 bit的寄存器,这使总线上的消息寻址更加灵活方便。为满足低功耗需求,该模块提供睡眠、掉电和MSCAN使能3种模式。
CAN总线中的数据帧由7个不同的位场组成:帧起始、仲裁场、控制场、数据场、CRC场、应答场、帧结尾。其中数据场的长度可以为0,但模块封装的帧最多不超过8个字节。根据仲裁位的不同可分为标准帧(11 bit标识符)和扩展帧(29bit标识符)。扩展帧格式包括4个ID寄存器IRD0~IRD3,8个数据寄存器DSR0和1个数据长度寄存器DLR,其中IRD0首位是ID28,IRD3末位是ID0。两者之间还存有信号标识位SRR、IDE和RTR。
4.2.2 CAN通信协议
CAN总线的通信采用主叫轮询方式。由于CAN的限制,每个网络内子节点不宜超过1 000个,这里取10 bit作为源和目的设备的ID标识。因为ID28只能为1,这里规定ID27~ID18为帧源ID,而ID17~ID8为帧目的ID。因为通信需要传输的数据多于8个字节,这里把DSR0作为传输多帧数据的总帧数寄存器,把DSR1作为传输多帧数据的当前帧数寄存器,DSR2作为帧功能寄存器, DSR3~DSR6传输数据,DSR7为校验寄存器。
4.2.3 通信流程
整个网络系统都是由上位机轮询通信的,主机先发送一个请求帧请求建立连接,待收到被叫节点响应帧后,连接建立并由主机请求数据,节点逐帧发送,待主机正确接收后再次请求发送,否则将发送出错帧请求重新发送当前帧,当全部数据正确传输后,主机发送断开连接帧完成通信。这里上位机通过发送一个修正因子给节点,修正上传数据的范围。
5 结束语
经实践证明,该设备网络在实验室条件下能够实现数据采集和网络通信,并达到预期目标。这种应用了安全可靠的CAN总线技术的检测网络,不仅能够有效降低人员现场巡查的难度,其最高1 Mb/s的传输速度可在第一时间发现隐患,排除故障。基于这些优势,CAN总线使人们振动传感器检测设备必然在自动化领域有着广泛的应用前景。

传感器相关文章:传感器工作原理
电流变送器相关文章:电流变送器原理 绝对值编码器相关文章:绝对值编码器原理











评论